The Future of Positioning: Exploring UWB and Bluetooth Channel Sounding
June 10, 2024
Introduction
The need to accurately locate people and items continues to be a massive economic driver and expected way of life for businesses and consumers alike. According to Gartner, the indoor location services market will reach $55 billion by 2030. Indoor Location-based technologies like Ultra-Wideband (UWB), Bluetooth® Low Energy (Bluetooth LE) and Wi-Fi cater to specific needs based on end-application requirements. Recently, UWB has gained widespread adoption commercially with its exceptional positioning accuracy, low latency and strong security features. It stands out by providing centimeter-level accuracy through its radar-like pulse transmissions, making it suitable for diverse applications from finding lost items to securely accessing buildings to tracking athlete performance and even navigating indoors.
Although UWB excels in micro-location, Bluetooth LE remains indispensable in the IoT ecosystem for its low power consumption, affordability and widespread adoption. As the de-facto standard for short-range personal area networks, Bluetooth LE utilizes several techniques for calculating positioning, including Receive Signal Strength Indicator (RSSI), Angle-of Arrival (AoA) and Angle-of-Departure (AoD), to provide distance and direction. Additionally, Bluetooth LE's upcoming introduction of a higher accuracy ranging technique known as "channel sounding" (CS) has significantly improved its positioning accuracy, as it measures the phase difference between radio signals and/or the time of flight of the radio signal to estimate distance.
This article explores UWB vs. Bluetooth LE positioning, discussing their characteristics, applications and recent enhancements. It provides a comparative analysis of these technologies, focusing on their accuracy, reliability and security to aid in selecting the most suitable technology for enterprise, industrial and consumer applications like indoor positioning, asset tracking or secure building access.
An Introductive Comparison Between UWB and Bluetooth LE
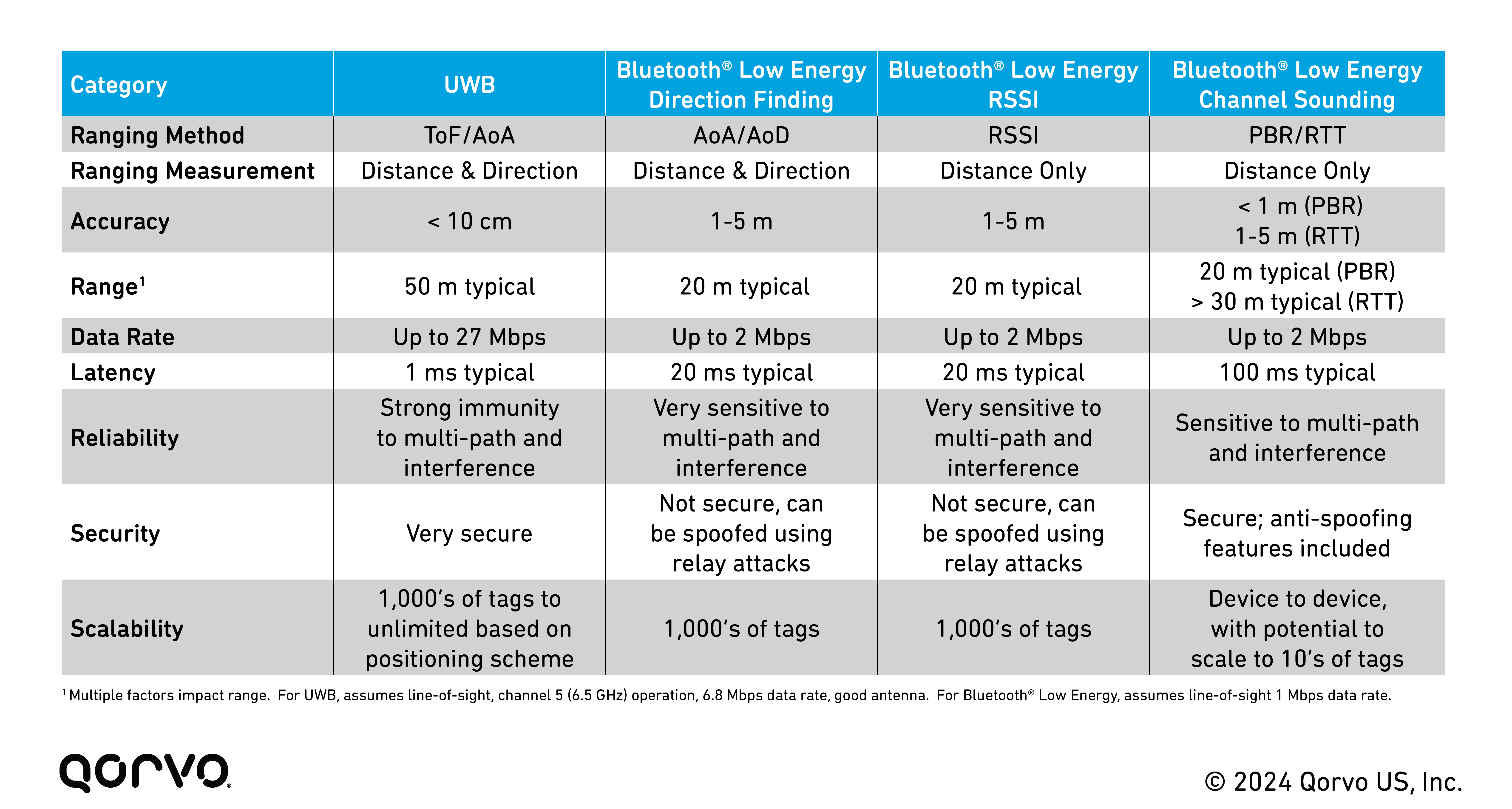
Let’s start with a high-level look at how UWB, traditional Bluetooth LE RSSI/AoA/AoD and Bluetooth LE CS stack up against one another. Table 1 offers a helpful summary in determining which technology might best suit your application and product design needs.
Understanding UWB
The origins of UWB trace back to the early 1900s, and the term “Ultra-Wideband” was coined by the US government in 1989 with investments to develop the technology in subsequent years. Initially restricted to military applications, UWB didn't see commercial use until the early 2000s. Almost two decades later, UWB achieved mass market adoption with the launch of the iPhone 11 with Apple’s UWB U1 chip inside, and it is now embedded in smartphones, automobiles and a plethora of IoT devices.
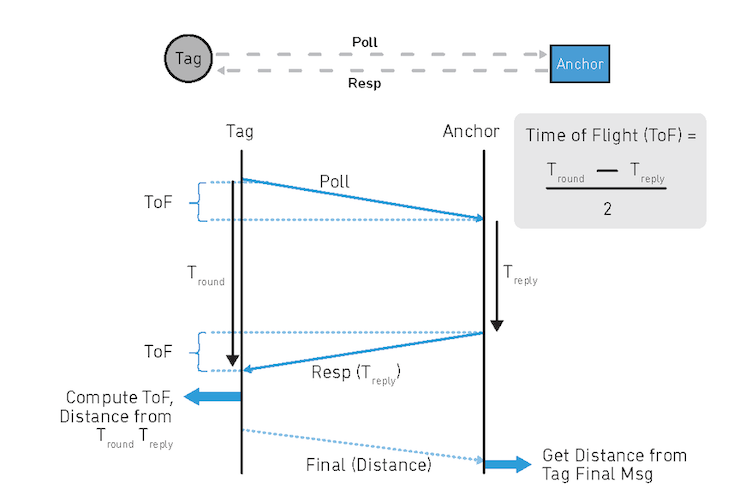
Unlike other technologies, UWB was specifically designed to enable precise, secure, real-time measurement of location, distance and direction. True to its name, UWB encodes and transmits data using very short ~2 ns pulse bursts spread over a very wide, 500 MHz channel bandwidth. Operating across a frequency range of 3.1 to 10.6 GHz, it offers the ability to accurately track objects to within a few centimeters over long ranges. UWB achieves this level of accuracy using Time of Flight (ToF) to calculate distance, where ToF is the round-trip time taken for a UWB pulse to traverse between two devices, such as an anchor and tag.
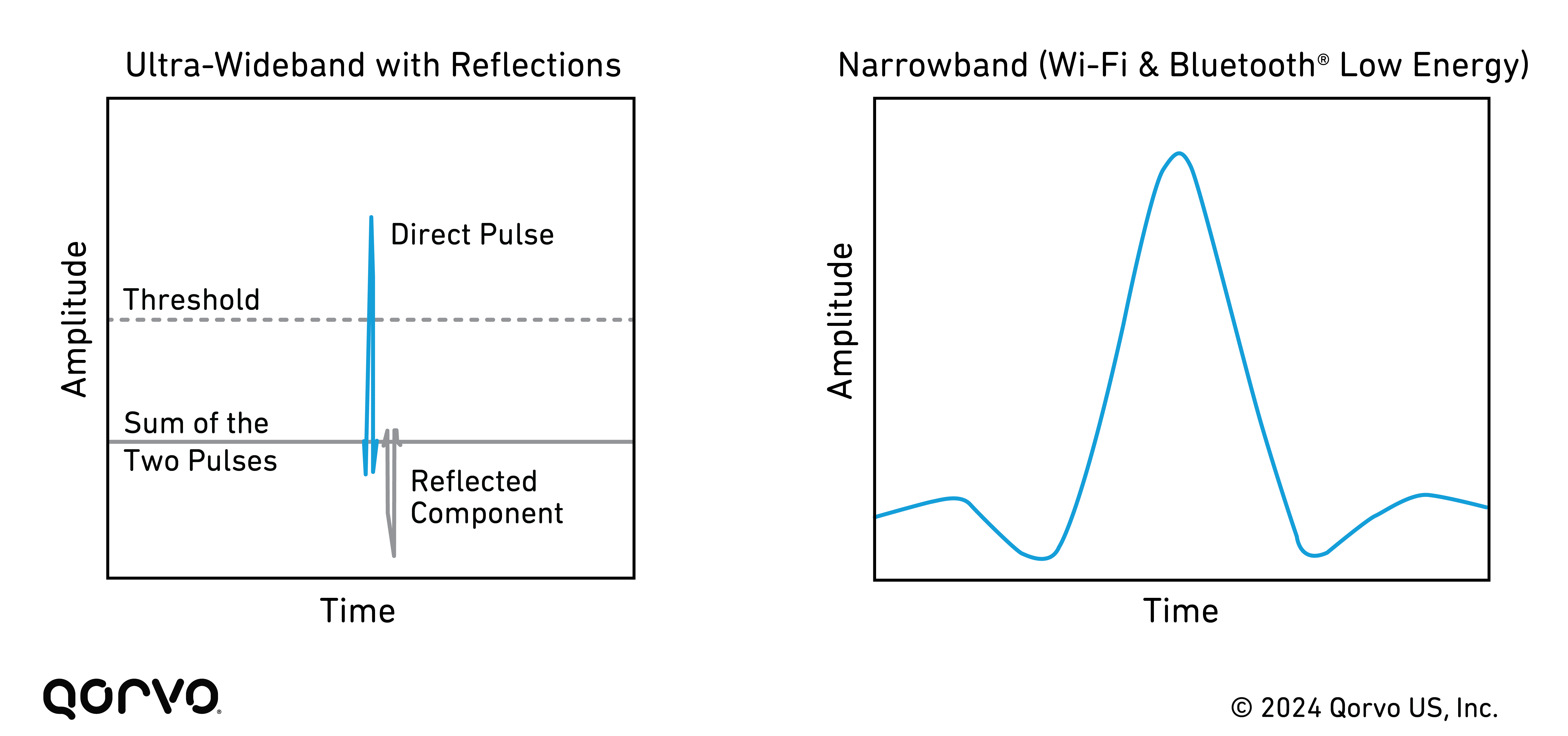
Using impulses rather than an amplitude or frequency modulated carrier signal makes UWB systems faster to initialize a link as well as send data with fewer repetitions. As shown in Figure 2, the UWB signal (left) has a much faster rise and fall time than the narrowband signal shown on the right, enabling it to precisely measure the time of arrival of the signal, increasing its immunity to multipath effects and interference from other radios. By spreading its energy over a wide bandwidth and transmitting it at an extremely low power level of -41.3 dBm (MHz), UWB appears as wideband noise to other narrowband radio signals such as Bluetooth LE.
UWB can also be implemented with several different topologies, including Two-Way Ranging (TWR), Time Difference of Arrival (TDoA) and Phase Difference of Arrival (PDoA), offering flexibility and tradeoffs in power consumption, scale of deployment and cost. (Explore more on these UWB topologies in Ultra-Wideband For Dummies) As a result, ranging can happen between two devices, between many (thousands) of devices or without any fixed anchor infrastructure in place.
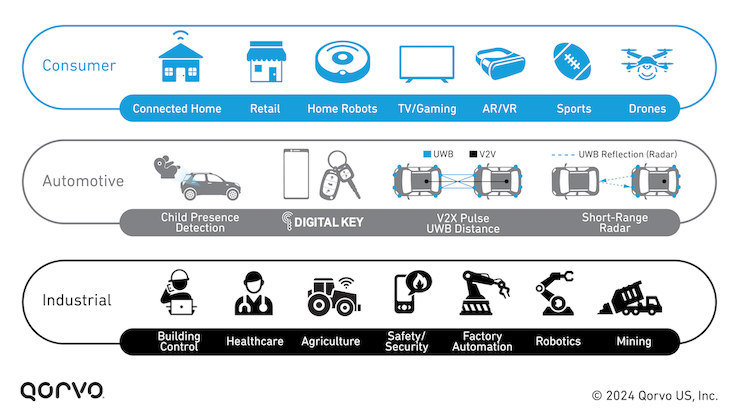
Additionally, UWB transmissions are extremely secure, and any attempt to intercept and amplify the signal, such as a relay attack, will not be successful. This results in UWB offering a low probability of detection and interception as well as anti-jamming properties in its signal space, making it attractive for many location-based applications shown below.
UWB technology is increasingly being recognized as a versatile solution for more than just ranging—it also offers inherent radar capabilities. UWB can be employed as a short-range radar system for presence detection, gesture recognition or even vital signs monitoring. This is achieved by simultaneously transmitting UWB radar frames and receiving channel impulse responses (CIRs) on one or more receive antennas. Radar algorithms then analyze the CIRs to sense motion, presence or gestures up to several meters away.
Understanding Bluetooth and Bluetooth LE Channel Sounding (Bluetooth LE CS)
Since its debut in 2004, Bluetooth LE has emerged as a cornerstone in the IoT domain, praised for its low cost, extended battery life and simple integration into consumer goods and services. Bluetooth LE excels in a range of applications, from traditional audio streaming and data transfers to automotive key fobs, smart home gadgets and mobile devices. Its efficiency stems from low power usage, data transmission across 40 channels in the 2.4 GHz band and mesh networking capabilities for large device networks.
Bluetooth LE positioning systems center around the use of beacons. As seen in Figure 4 below, two techniques are used to estimate location – Trilateration and Triangulation. Trilateration, the most prevalent method, calls for at least two reference Bluetooth LE beacons with a known distance between them, using RSSI to estimate distance. On the other hand, triangulation depends on known distances between two or three reference points and measures angles—either AoA or AoD to estimate distance and direction.
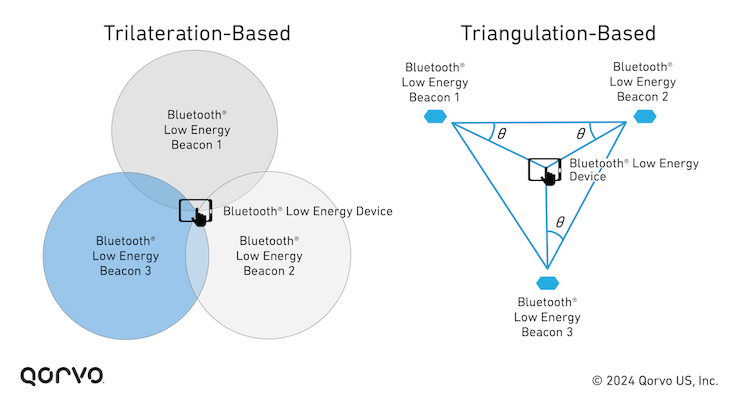
Bluetooth LE 5.1 introduced triangulation-based direction finding with two methods for estimating location:
- AoA: A transmitter with one antenna sends a special signal. A receiver with multiple antennas measures phase differences to determine the signal’s direction.
- AoD: A stationary transmitter with multiple antennas sends signals. A receiver with a single antenna measures phase differences to determine the signal’s direction.
Today, Bluetooth LE is advancing its positioning capabilities beyond RSSI and AoA/AoD by leveraging the novel “channel sounding” technique. This new technique, which represents a significant evolution from traditional Bluetooth LE distance measurements, utilizes two approaches - phase-based ranging (PBR) and round-trip time (RTT) to accurately determine distance between two Bluetooth LE devices. By sending and analyzing the phase variance of radio signals across different frequencies, PBR offers more precision in estimating distance, as it can achieve sub-meter positioning accuracy. On the other hand, using RTT based on the ToF of the radio signal provides enhanced security (time delays are harder to hack), longer range, and can be performed in addition to PBR in a channel sounding procedure.
Bluetooth LE channel sounding (CS) introduces a new physical layer that uses amplitude-shift keying modulation across 72 channels rather than the traditional 40 channels. It is also incorporated into the Bluetooth LE stack's link layer, which handles the setup, timing and security of channel sounding.
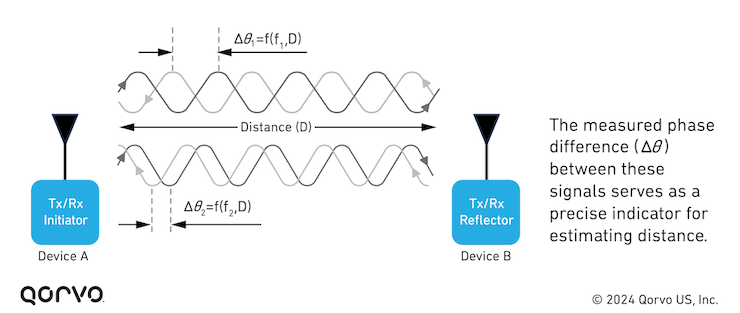
Let’s see how Bluetooth LE CS PBR works in simple terms. As shown in Figure 5, Device A sends a radio signal to Device B. Device B checks the signal's phase and sends it back to Device A. Then, Device A compares the phases of the sent and received signals to calculate the distance the signal traveled. By doing this over various frequencies, Bluetooth LE devices can accurately measure distance using phase information.
Bluetooth LE CS is being positioned as a more secure, more accurate positioning technique than Bluetooth LE RSSI. As such, it only provides a distance measurement, not direction, and its two modes (PBR and RTT) can be used to tradeoff range, accuracy and security. In addition, using Bluetooth LE CS to estimate distance is a complex sequence of communication events between two devices that consumes a lot of power in post-processing measurement results, ultimately leading to long-ranging times and challenging user experiences. While advanced algorithms can be used to improve ranging accuracy, it comes at the expense of power consumption and reduced battery life.
Choosing Between UWB and Bluetooth LE CS
When selecting an indoor positioning technology, the specific application requirements determine the most suitable choice. Bluetooth LE is extensively integrated into various devices, including mobile phones, home hubs and IoT products. Meanwhile, UWB is rapidly advancing and gaining broader ecosystem adoption, since its acceptance into today’s smartphones and automobiles. Although Bluetooth LE is now advancing its positioning features, it will require upgrading to new hardware that supports Bluetooth LE 6.0 to harness the capabilities of Bluetooth LE CS. Because Bluetooth LE CS is still in its infancy, this technology may take a few years to gain widespread market adoption.
Both Bluetooth LE CS and UWB are good positioning technologies and, in some cases, could be complementary to each other. For example, to track a small asset up to 50 meters in a warehouse indoors, Bluetooth LE CS could be used to obtain coarse positioning (within a meter) and UWB to obtain fine positioning (within less than 10 cm). In many of today’s ranging applications, the UWB implementation typically uses a 2.4 GHz Bluetooth LE radio for initial device discovery and authentication prior to activating the UWB radio for secure fine ranging, so the two technologies are already in use together. Bluetooth LE CS simply provides another option, and for many applications already using Bluetooth LE RSSI, an improved distance measurement may be all that is needed.
Range, data rate and power consumption are most often the key benchmarks used to evaluate IoT connectivity technologies, and with positioning technologies, security and deployment costs are also of keen interest. Let’s explore how a few of these figures-of-merit compare between the two technologies.
Range
Range is a tricky metric to quantify, as there are many factors involved that can impact achievable range. While the frequency of operation, data rate and antenna design are all critical, the application environment directly impacts achievable range, especially indoors, where multipath signal reflections are present. In addition, some regions, such as Europe, have regulations to allow UWB to transmit up to 10 dB higher power level (i.e. -31.3 dBm (MHz)), further increasing range.
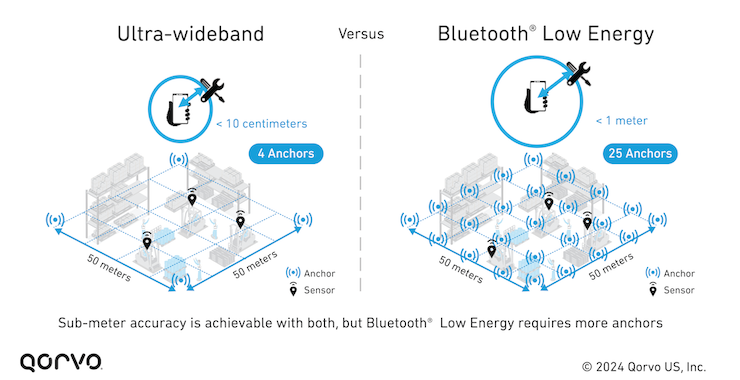
Under typical line-of-sight (LOS) conditions, UWB can measure distance in the range of 50 meters. On the other hand, Bluetooth LE is limited to accurately measuring distance in the range of 20-30 meters. As shown in Figure 6, for the same coverage area of 2500 m2, UWB would need less anchors compared to Bluetooth LE, resulting in lower infrastructure, deployment and maintenance costs. To put it another way, to maintain a sub-meter accuracy, more anchors are required with Bluetooth LE to minimize distance between the anchor and the tag.
While Bluetooth LE CS in PBR mode improves positioning accuracy to sub-meter levels, and using RTT mode can increase range by more than 50 meters, there will be a tradeoff between accuracy and range (Bluetooth LE CS-RTT accuracy is several meters). As such, for Bluetooth LE CS, the sub-meter accuracy is limited to shorter distances and at the edge of the coverage area, the accuracy will typically degrade, especially in challenging multipath environments.
Security
In today's tech-savvy world, concerns about cyber security, hacking and protecting our personal information remain front and center. Unfortunately, many of us have received notifications of data breaches from companies or services that we use. With so much data being transmitted wirelessly, it is crucial to develop connectivity products with the strongest security possible.
The Bluetooth special interest group (Bluetooth SiG) is working to ensure that Bluetooth LE CS will be a safe and secure positioning technology for device-to-device communication. In order to use Bluetooth LE CS, establishing a secure connection between the initiator device and reflector device is a pre-requisite. The standard incorporates anti-spoofing features into the packet structure, with cryptographically scrambled packets part of the CS procedure. But CS is still in its infancy, and its security gaps are still unproven. In fact, it may take years before Bluetooth LE CS gets adopted in markets such as Automotive for digital car key use cases, as the Car Connectivity Consortium (CCC) would need to be convinced that Bluetooth LE CS is secure, quick and compatible.
Meanwhile, UWB is already known for its strong security features. Already a pulse-based signal that uses ToF, the standard that UWB is based on - IEEE 802.15.4z - has added security enhancements at the physical layer (PHY), including cryptography, random number generation and other techniques that make it harder for an external attacker to manipulate UWB communications.
At its core, UWB employs the Advanced Encryption Standard (AES) protocol, an encryption specification widely adopted by the US federal government, to generate and secure data packet transmissions. In UWB, Scrambled Timestamp Sequences (STS) encode the precise timing in the signaling between devices to ensure correct distance measurements. The data is encrypted with AES keys to prevent spoofing of the timestamps. In addition, some UWB devices are already meeting Security Evaluation Standard for IoT Platforms (SESIP) level-3 certification.
Scalability and Design Challenges
Bluetooth LE CS as constructed, means only one device can range with another device at a time. As broadcast features aren’t supported, one device can take turns ranging with multiple devices, but that will increase measurement time and limit scalability. Getting even a reasonably accurate distance measurement between two devices involves a complex CS procedure with events and subevents, leading to long ranging times. While this may be acceptable for some applications like peer-to-peer communication or coarse proximity detection, it won’t be feasible for applications such as an automotive manufacturing assembly plant, where the location and transportation of hundreds of assets are critical to avoid downtimes and cost overruns.
Another consideration is how Bluetooth LE CS will be leveraged in smartphones. Bluetooth LE CS does allow multiple antennas to be used to mitigate multipath effects. However, using Bluetooth LE AoA or even Bluetooth LE CS with multiple antennas will be challenging for smartphones, as the antenna spacing requirements are restrictive. For a typical Bluetooth LE AoA implementation, two receive antennas are utilized, placed a half-wavelength apart to ensure a 180° max phase difference. At 2.4 GHz, the Bluetooth LE wavelength (λ) = 125 mm and the receive antennas would need to be placed (λ/2) = 62.5 mm apart. In comparison, at 8 GHz, the UWB wavelength (λ) = ~37.5 mm and λ/2 = ~18.8 mm, a fraction of the Bluetooth LE antenna spacing. With modern smartphones already utilizing multiple radios (5G, Wi-Fi, Bluetooth LE, NFC, UWB) with multiple antennas, spacing Bluetooth LE antennas to support AoA faces barriers to adoption. Eventually, Bluetooth LE chips designed for smartphones will most likely support Bluetooth LE CS, but whether Bluetooth LE CS as a positioning feature is used or not will be up to the device maker.
UWB, on the other hand, is already in all major smartphones, being used for finding personal items, unlocking cars and navigating indoors. For indoor asset tracking, it can scale to hundreds if not thousands of devices, using Uplink-TDoA (UL-TDoA), where UWB tags transmit or “blink” to a network of time synchronized anchors that then communicate with a central location engine (gateway) to calculate the position of the tags. In a factory warehouse example, as shown in Figure 6 above, UL-TDoA can also be combined with Downlink-TDoA (DL-TDoA) to locate asset tags and then to navigate to those asset tags using a mobile phone or other device.
How Qorvo Tackles Location-Based Applications
As a leader in connectivity solutions for IoT, Qorvo has an existing portfolio of UWB solutions to address location-based applications that require extremely accurate positioning, especially indoors. Qorvo’s UWB solutions include multiple generations of UWB transceivers, antennas, turnkey modules and software stacks supporting TWR, TDoA and PDoA implementations. Qorvo has also established partnerships with a wide range of companies worldwide on UWB design and manufacturing to help customers with proof of concepts through production designs.
In addition to UWB, Qorvo also offers a suite of Bluetooth LE/Matter solutions for smart homes, lighting and low-power IoT applications. The portfolio consists of optimized, easy-to-use and certified solutions for gateways, home hubs and end devices. A key differentiator Qorvo offers is ConcurrentConnect technology, where communications between multiple devices operating on different standards and protocols can be managed simultaneously with no detectable latency.
A Final Word
This article explored the evolution, capabilities and applications of UWB, Bluetooth LE RSSI, AoA and CS technologies, especially focusing on their roles in location-based services. UWB, known for its precision and resilience to interference, excels in applications requiring high accuracy and security, such as asset tracking and access control. Meanwhile, Bluetooth LE continues to be a foundational technology in the IoT ecosystem, with advancements like direction-finding and channel sounding techniques enhancing its positioning capabilities. By analyzing key factors like accuracy, reliability, security and cost, engineers can determine the best fit for their specific applications.
For more on this topic and solutions, we encourage you to view these collateral pieces – UWB webpage, UWB Digital Key eBook, IoT For Dummies eBook, UWB For Dummies eBook, UWB Digital Key eGuide, Design Summit Webinar, our UWB evaluation kits, our UWB white papers and our many blogs on UWB. Additionally, you can find more interesting collateral on this subject by visiting our Qorvo Design Hub for a rich assortment of videos, technical articles, white papers, tools and more.
The Bluetooth® word mark and logos are registered trademarks owned by Bluetooth SIG, Inc. and any use of such marks by Qorvo US, Inc. is under license. Other trademarks and trade names are those of their respective owners.
Have another topic that you would like Qorvo experts to cover? Email your suggestions to the Qorvo Blog team and it could be featured in an upcoming post. Please include your contact information in the body of the email.